Virtuální simulace přináší nezpochybnitelné výhody při tréninku pracovníků i návrhu a optimalizaci práce průmyslových strojů. Aby byly simulace matematicky a fyzikálně přesné a současně vizuálně věrné a rychle proveditelné, je nezbytné pracovat s prověřenými nástroji a knihovnami. Algoryx přináší obojí. Využívat lze prostřednictvím pluginu v Ansys SpaceClaim stejně jako real-time herních enginech Unreal a Unity.
1. Nástroje Algoryx
Srdcem všech nástrojů Algoryx je real-time dynamická simulační knihova AGX Dynamics. Zbylými nástroji jsou softwary Momentum a Momentum Granular. V obou případech jde o pluginy do 3d modelovacího softwaru Ansys SpaceClaim. Základní Momentum plugin zahrnuje základní funkce AGX Dynamics a přidává k nim 3D modelování a analytické komponenty, rozšířený plugin Momentum Granular poté dále možnosti simulace manipulace s materiálem (zejména granulovanou hmotou) a provádění hloubkových analýz.
1.1 Knihovna Algoryx AGX Dynamics
Expresivní, rychlý, robustní a vysoce věrný systémAGX Dynamics usnadňuje modelování a simulaci složitých hybných mechanických systémů. Může být použit pro analýzu a návrh, nebo jako „fyzikální engine“ k řízení interaktivních aplikací pro trénink stejně jako virtuální cvičiště pro umělou inteligenci a strojové učení. Klíčovou funkcionalitou je podpora práce s rázy, kontakty a třením.
S AGX Dynamics je možné modelovat práci robotů, průmyslových strojů, těžkých vozidel, jeřábů a dalších mechanických systémů, stejně jako analyzovat chování sypkých materiálů při jejich manipulaci. AGX Moduly otevírají možnost vytváření složitých modelů, aniž by bylo nutné dělat kompromisy nebo používat příliš zjednodušenou idealizaci.
Knihovna AGX Dynamics se skládá ze základní knihovny (na schématu vlevo) s nástavbou v podobě specializovaných modulů (na schématu uprostřed). Tyto moduly jsou využívány v rámci integrace do simulačního softwaru (na schématu vpravo).
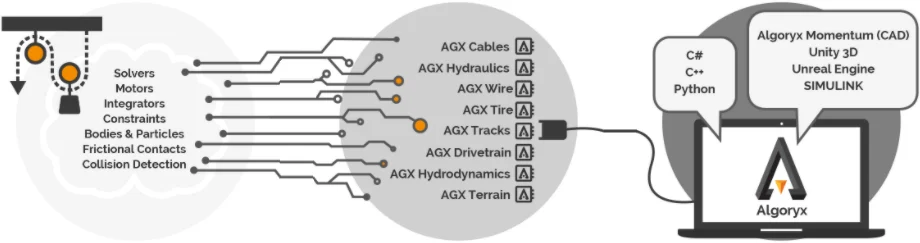 Funkční schéma knihovny AGX Dynamics
Funkční schéma knihovny AGX Dynamics
Základní knihovnu lze chápat jako software development kit (SDK) obsahující funkce pro výpočet základních fyzikálních komponent potřebných pro modelování a simulace mechanických systémů s různými typy kontaktů se zahrnutím tření. Zpracování nezbytných propočtů v SDK je velice rychlé, stabilní a fyzikálně věrné i při použití v real-time 3D a VR interaktivních simulacích.
Moduly AGX Dynamics
AGX Moduly jsou specializované komponenty pro řešení specifických komponent a výpočtů. Zjednodušeně přináší typově specializované výpočty nad rámec základní vrstvy.
AGX Kabely / AGX poškození kabelů
Modul určený pro simulaci dlouhých pružných konstrukcí o kruhovém průřezu, jako jsou hadice, lana, kabely a podobně. Parametrizovanou vlastností je schopnost ohybu, tahu / tlaku, smyku a krutu. Kabely mohou být v kontaktu s předměty libovolného geometrického tvaru, včetně kontaktu s vlastním tělem.
Modul AGX poškození kabelů přidává nad rámec základního modulu výpočty pro odhad opotřebení a poškození způsobeného na kabelu během simulace. Výstupem je souhrnná zpráva. Započítávány jsou všechny typy namáhání se zahrnutím působících sil a rychlosti deformací, a to dle nakonfigurované sady vah jednotlivých napětí. To výrazně pomáhá při optimalizaci řadičů, směrování dress packu, analýzy problémů a identifikace jejich příčin.
AGX Ocelová Lana
Ocelová lana mají obdobně jako kabely určitou odolnost v tahu a ohybu, avšak oproti kabelům téměř nulovou odolnost v krutu. Rovněž oproti kabelům jsou zpravidla delší a vystaveny značně vyššímu napětím. Modul lze adaptovat rovněž na použití s dráty a řetězy.
AGX Hydrodynamika / Dynamika plynu
Modul určený pro výpočet síly vztlaku a odporových / tažných sil z obtékání tělesa kapalinou se zahrnutím hladiny tekutiny. Výpočet se provádí na trojúhelníkové síti tělesa, jeho přesnost tedy odpovídá přesnosti modelu tělesa.
AGX Terén
Modul zaměřený na modelaci a simulaci deformaci půdy kontaktem s koly, pásy, noži, lopatami a lopatami při terénních, výkopových a jiných pracích buldozerů, rypadel, kolových nakladačů, pásových a dalších typů vozidel. Započítává rovněž dynamickou změnu zhutnění materiálu. Součástí modulu je kalibrovaná, konfigurovatelná knihovna půdních modelů pro štěrk, písek a nečistoty. Díky ve výpočtech zahrnuté přesných obousměrných sil mezi nástroji kontaktních těles a terénem je možné využití modulu v rámci simulací práce autonomních strojů využívajících strojového učení.
AGX Pneumatika
Modul přidává flexibilitu reprezentující chování pneumatiky jinak tuhým kolům. To zahrnuje pružnost, prokluz a anizotropní tření v dopředném a příčném směru. Pneumatika AGX pracuje pro scénáře na silnici i v terénu. K dispozici je několik předkonfigurovaných modelů pokrývajících použití pro rypadla, kolové nakladače, vysokozdvižné vozíky, nákladní automobily a mobilní roboty.
AGX Pohonné ústrojí
Modul slouží k simulaci dynamiky samostatných mechanických součástí (hřídele, ozubená kola, diferenciály, spojky...) pracujících v rámci většího celku (kompletního dynamicky fungujícího ústrojí). Vzájemné uchycení jednotlivých komponent lze konfigurovat individuálně, včetně zanesení vůlí, přesahů a stupňů volnosti. Díky komplexní simulaci ústrojí jako celku dosahuje výsledná simulace věrohodných výsledků. Modul AGX Pohonné ústrojí také zahrnuje katalog modelů motorů volitelných dle hodnoty točivého momentu proti otáčkám za minutu.
AGX Sypký materiál
Modul určený pro studium a optimalizaci designu a řízení systémů pro hromadnou přepravu a zpracování sypkých materiálů, ať už jde o granule, kameny, pelety, pilulky nebo zrna. V těchto systémech má zásadní význam rychlost + rovnoměrnost toku materiálu a pracovní cyklus stroje - zlepšení toku může vést k výrazným úsporám času a energie.
Modul používá metodu Nonsmooth Discrete Element Method (NDEM) namísto konvenčnější metody Discrete Element Method (DEM), což znamená, že je hluboce integrována do základních modelů a numerických metod v srdci AGX Dynamics. Vícedílcové a specializované granulované řešiče jádra jsou pevně spojeny, což vede k přesným vazebným silám mezi sypkým materiálem a mechanickými systémy a velmi stabilním simulacím. Simulaci peletovacího bubnu se stovkami tisíc pelet nebo plně naloženého sklápěče lze tak provést s plnou důvěrou.
AGX Pásy
Modul umožňuje simulaci pohybu pásového vozidla nebo dynamického pásového dopravního.
AGX Hydraulika
Modul pro simulaci komplexních hydraulických systémů. Umožňuje rovněž zahrnutí mechanických komponent (akumulátor, binární ventily, zpětné ventily, motory, čerpadla s pevným i proměnným výtlakem, uzavírací ventily, jehlový ventil, pojistný ventil) a modelování smíšených mechanických a hydraulických systémů. Spojení s hnacím ústrojím AGX a mechanická simulace se provádí pomocí lineárních a rotačních pohonů. Modul umožňuje simulovat celý hydraulicky poháněný systém, jako je hydraulický naviják, rypadlo, jeřáb nebo kolový nakladač.
1.2 Pluginy do externích softwarů
AGX Dynamics je fyzikálním enginem bez jakéhokoli uživatelského rozhraní. K jeho využívání je tedy nutné jej napojit na vhodný software. Jelikož schopnosti jednotlivých softwarů se liší, zpravidla je potřeba pro napojení do jednotlivých softwarů jakási dodatečná komunikační vrstva, říkejme jí plugin. Algoryx aktuálně nabízí pluginy hned pro 3 softwary - 3d modelovací software Ansys SpaceClaim a herní enginy Unreal a Unity.
1.2.1 AGX Dynamics pro herní enginy Unity a Unreal
Herní enginy Unreal a Unity patří mezi nejpopulárnější a nejpokročilejší nástroje pro real-time 3D tvorbu. Oba podporují deployment a tvorbu aplikací pro různé platformy a operační systémy, stejně jako velmi pokročilou grafiku a možnosti práce a importu 3D modelů a dalších assetů. Rozdíly jsou drobné, přesto volba vhodného enginu dokáže ušetřit vysoké náklady na nákupu nezbytných licencí samotného softwaru a dodatečných řešení, více o tom v samostatném článku Unreal vs Unity - srovnání áčkových herních enginů.
AGX Dynamics plugin v obou případech nahrazuje v enginech zabudovanou nativní fyziku. Podporovány jsou všechny moduly AGX Dynamics. V případě obou pluginů jde o oficiální rozšíření (Algoryx je verifikovaným dodavatelem řešení) a lze tedy předpokládat plná podpora a stabilní běh.
AGX Dynamics plugin pro Unity je již k dispozici. Dokumentace je dostupná na stránkách Algoryx. Plugin pro Unreal Engine by měl vyjít brzy.
1.2.2 Momentum a Momentum Granular pro Ansys SpaceClaim
Momentum pluginy přidávají možnosti přesných fyzikálních simulací do CAD softwaru Ansys SpaceClaim. Základní plugin Momentum pracuje s modelem Multibody System Dynamics (MBDS) a tedy umožňuje simulaci celistvých reálných sestav bez potřeby jejich idealizování. Rozšiřující plugin Momentum Granular využívá kombinovaný model MBDS a Nonsmooth Discrete Element Models (NDEM), jež přináší možnost zahrnutí sypkých materiálů v rámci simulací.
Pluginy Momentum přinášejí značnou automatizaci při tvorbě simulací. Dodatečné funkcionality lze přidávat zápisem v jazyku Python. Výsledné analýzy lze prohlížet přímo ve SpaceClaim případně exportovat do oblíbeného analytického nástroje. SpaceClaim umí rovněž zaznamenávat průběh simulací na video.
V obou případech se jedná o pevně nakonfigurované simulace bez možnosti real-time externí interakce. Pro tu je nutné provést import do vybraného herního enginu.
2. Simulace napříč odvětvími
Algoryx nástroje jsou uplatnitelné v širokém spektru oborů od běžného tréninku pracovníků, přes virtuální prototypování moderních strojů až po vývoj systémů autonomního řízení.
2.1 Robotika a autonomní stroje
Průmysloví roboti jsou relativně komplikované mechanické stroje obsahující množství dynamicky namáhaných součástí při jejich práci řízené počítačovým algoritmem. Virtuální simulace přináší obří benefity v obou případech - od dynamické simulace samotné funkce a namáhání komponent (motory, převodovky, klouby, chapadla, ramena, přísavky, kabely, dresspacky, pásy, kola...) stejně jako tréninku a optimalizaci řídících systémů založených buď na standardním programu nebo strojovém učení.
Využití fyzikálně přesných simulací pomáhá s odbouráním zásadních chyb v průběhu prototypování nových robotů stejně jako optimalizaci programů stávajících robotů vedoucí ke zvýšené produkci. Virtuální simulace dosahují úrovně přesnosti v rámci požadovaných tolerancí pro stavbu robotů. Rovněž umožňují prostřednictvím protokolu ROS (popř. přes C/C++C#, Python, Simulink/Matlab nebo FMI) využití v rámci Software-in-the-Loop (SIL) testování a později snadné nasazení na reálné stroje.
Více informací o využití AGX Dynamics pro simulace v robotice naleznete na webu Algorys.
2.2 VR & Tréninkové simulátory
Simulační aplikace pro trénink náročných úkonů a ovládání komplexních moderních strojů mnohdy vyžadují absolutní přesnost a věrohodnost chování. Toho často nelze efektivně využít bez použití fyzikálně přesné fyziky. Spolu s ní je v tomto typu simulací nutné používat rovněž věrné digitální dvojčata reálných strojů a prostředí. Tento typ tréninkových simulací pro maximální věrohodnost je zpravidla tvořen pro použití s VR headsety.
2.3 Manipulace s materiálem
Těžařský, zemní, farmaceutický a další průmysly vyžadují pro maximalizaci produkce a minimalizaci opotřebení přepravníků dosahovat maximální možné efektivity toku materiálu. S komplexními simulacemi (a hledáním nových inovativních řešení) pro mechanické vedení toku sypkých materiálů pomáhá nástroj Momentum Granular. Ten pracuje s kobinovaným modelem MBD (Multibody System Dynamics) a DEM (Nonsmooth Discrete Element Models). Výstupní simulace dosahují vysoké přesnosti a stability.
2.4 Real-time simulace a virtuální prototypování těžkých vozidel
Stále sílící tlaky na ekologii a produktivitu se nevyhýbají ani světu těžkých pracovních strojů. Oproti konvenčním vozidlům se tyto stroje často pohybují v nezpevněném terénu a pracují materiálem nenormalizovaného tvaru a velikosti.
Cílem virtuální simulace je zde umožnit opakované testování mnoha různých řešení v různých scénářích a tím generovat dostatečně velké a rozmanité datové sady pro optimalizaci stávajících řešení a trénování autonomních systémů.
2.5 AI & strojové učení
Prakticky v případě vývoje jakýchkoli autonomně pracujících systémů není možné pracovat pouze s daty získanými v reálném světě. At už jde o mainstream systémy v podobě autonomního řízení vozidel, nebo jen specifické komponenty, analýzám a trénování řídících AI systémů pomocí dat získaných při virtuálních simulací se obejít nelze.
Získání věrných dat je v případě virtuálních simulací podmíněno použitím přesné fyziky, 3D grafiky a AI softwaru. AGX Dynamics lze využít v rámci širokého spektra externích nástrojů, od herních enginů, přes AI nástroje Tensorflow, pyTorch, ML Agents a Matlab až po volnost vlastní implementace kamkoli je potřeba.
Více informací o využití AGX Dynamics pro trénink a využití AI systémů naleznete na webu Algorys.
2.6 Jeřáby, kabely, vodiče
V námořních i pobřežních aplikacích navijáků a jeřábů se pracuje často s velmi vysokými zátěžnými silami. Vyjma samotného přenosu sil pomocí vhodného pohybového ústrojí obohaceného převodovkou je nutné rovněž počítat s vhodným designem navíjení lana na buben. Této problematice jsem se v analytickým způsobem zabýval v rámci diplomové práce. Využití počítačové simulace by umožňovalo znatelně lepší návrh celého mechanismu včetně bubnu.
Více informací o využití AGX Dynamics pro simulace v tomto typu simulací naleznete na webu Algorys.
2.7 Námořní stavby a doprava
Námořní operace jsou oproti pobřežním finančně náročnější, konstrukčně složitější a zároveň zdravotně rizikovější. Spadat do nich může cokoli od prosté manipulace s kotvami až po montáž větrných turbín, používání jeřábů umístěných na plavidlech, i simulacím ROV (Remotely Operated Vehicles = dálkově řízené vozidla) operujících na mořském dně. AGX Dynamic umožňuje zahrnovat veškeré síly nezbytné pro dosahování věrohodných výsledků simulací.
Více informací o využití AGX Dynamics námořních operacích naleznete na webu Algorys.
_______
Rádi by jste využili virtuální simulace v rámci Vašeho podnikání?
Průmyslové simulace | Profesní simulace